Research
Others
Invited Papers
[Domestic Invited Papers]
| 2014 | 1 invited paper on surface reconstruction in a Japanese magazine |
| 2013 | 1 invited paper on surface reconstruction in a Japanese journal |
Journal
Tomographic Surface Reconstruction from Point Cloud

|
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki, Inspired by computed tomography (CT), this paper presents a novel surface reconstruction algorithm, {\em tomographic surface reconstruction}, to reconstruct a surface mesh from a point cloud equipped with oriented normals. In the process of scanning a real object using an X-ray CT system, it generates a sinogram consisting of projection images that are maps of X-ray transmission lengths, and then, a tomogram (CT volume) is reconstructed from the sinogram. A hole-free surface mesh is then easily obtained by polygonizing an isosurface. To adopt this CT paradigm to surface reconstruction from a point cloud, only a scheme to generate a sinogram from a point cloud is required. The value of a sinogram for surface reconstruction can be defined as the sum of the distances between the intersecting points of a ray and the underlying surface, which are defined as the maxima of the point density. While ordinary CT scanning uses projection directions which share a single rotation axis, tomographic surface reconstruction adopts randomly selected projection directions and successfully improved the reconstruction robustness. By applying an iterative CT reconstruction to the sinogram, the algorithm generates a tomogram whose boundary between the foreground and background approximates the surface of the object. The effectiveness for a point cloud with a lack of sampling and outliers is demonstrated from experimental results. |
Boundary Representable Partition of Unity for Image Zooming

|
Yukie Nagai, Yutaka Ohtake, Hideo Yokota and Hiromasa Suzuki |
Smoothing of Partition of Unity Implicit Surfaces for Noise Robust Surface Reconstruction

|
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki We propose a novel method for smoothing partition of unity (PU) implicit surfaces consisting of sets of nonconforming linear functions with spherical supports. We derive new discrete differential operators and Laplacian smoothing using a spherical covering of PU as a grid-like data structure. These new differential operators are applied to the smoothing of PU implicit surfaces. First, Laplacian smoothing is performed for the vector field defined by the gradient of the PU implicit surface, which is then updated to reflect the smoothing of the gradient field. This process achieves a method for noise robust surface reconstruction from scattered points. |
[Domestic Journal Publications]
| 2011 | 1 domestic refereed journal publicaion |
| 2010 | 1 domestic refereed journal publicaion |
| 2007 | 2 domestic refereed journal publicaions |
Conference Proceedings
Multi-Material 3D Shape Reconstruction by Dual-Energy CT Imaging
|
Mitsuru Negishi, Yutaka Ohtake, Hiromasa Suzuki, Yukie Nagai
|
Efficient Iterative CT Reconstruction on Octree Guided by Geometric Errors
|
Seungki Kim, Akitsune Sakane, Yutaka Ohtake, Hiromasa Suzuki, Yukie Nagai, Katsutoshi Satoh, Hiroyuki Fujimoto, Makoto Abe, Osamu Satoh, Toshiyuki Takatsuji
|
Inner Defect Detection in Ceramic Matrix Composite Parts using 3D X-ray CT Image Registration
|
S. Kondo, H. Suzuki, Y. Ohtake, Y. Nagai, H. Hishida, K. Inagaki, T. Nakamura, F. Watanabe
|
3D printing of product prototypes with inserted metal weights to obtain desired mass distribution,
|
Deepak Keshwani, Hiromasa Suzuki, Ohtake Yutaka, Yukie Nagai
|
3D Scanning Based Mold Correction for Planar and Cylindrical Parts in Aluminum Die Casting,
|
Takashi Seno, Yutaka Ohtake, Yuji Kikuchi, Noriaki Saito, Suzuki Hiromasa, Nagai Yukie
|
Flattening Simulations of 3D Thick Sheets Made of Fiber Composite,
|
Kotaro Morioka, Yutaka Ohtake, Hiromasa Suzuki, Yukie Nagai, Hiroyuki Hishida, Koichi Inagaki,
Takeshi Nakamura, Fumiaki Watanabe
|
The Shape Correction by Comparing Shape Silhouette-lines with a Sinogram,
|
Trung Vuong Pham, Yutaka Ohtake, Yukie Nagai, Hiromasa Suzuki
|
Efficient 3D Crease Point Extraction from 2D Crease Pixels of Sinogram
|
Ryo Jinnouchi, Yutaka Ohtake, Hiromasa Suzuki, Yukie Nagai
|
Ruled Free Forms
|
S. Flöry, Y. Nagai, F. Isvoranu, H.Pottmann and J.Wallner
|
Boundary Representing Partition of Unity for Image Zooming
|
Yukie Nagai, Yutaka Ohtake, Hideo Yokota, and Hiromasa Suzuki
|
Outlier/Noise-Robust Partition of Unity Implicit Surface Reconstruction

|
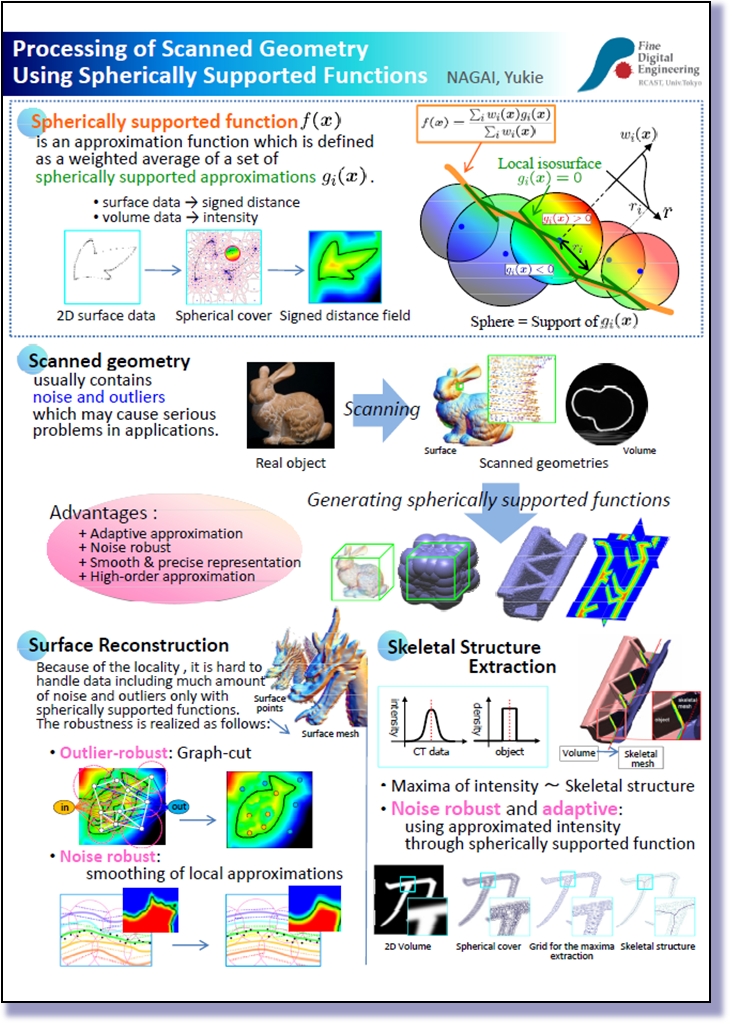
Yukie Nagai, Yutaka Ohtake, Hiromasa Suzuki, and Hideo Yokota In this paper, we propose an algorithm for outlier/noise-robust surface reconstruction based on a partition of unity (PU) approach. PU based surface reconstruction is a local method that covers an area including sampling points with spherical supports of local approximations, and then generates an approximation function whose zero-level sets approximate the surface. This algorithm has many advantages including representation of fine details, and fast and memory efficient computation. Many of these advantages are realized with the locality of PU however, it is also the reason of outlier/noise-instabilities. Unfortunately, scanned data generally contain much amount of noise, and hence improving the robustness of PU based algorithm is required. We achieve an outlier/noise-robust algorithm with integrating Graph-cut and diffusion of local approximations. Since the characteristics of outliers and noise are fundamentally different, overcoming these two with different approaches is reasonable. In our algorithm, first a spherical cover of an area containing input points is generated following the PU manner. And then Graph-cut is performed in order to determine spherical supports which are considered wrongly approximating affected by outliers. Finally, the PU approximation function is updated so that its gradient field smoothed. This smoothing is based on a diffusion of the local approximations. In this paper we show the effects of this integration approach for several scanned data sets. |
Noise Robust Surface Reconstruction by Combining PU and Graph-cut

|
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki We present a novel method of reconstructing surfaces from 3D scattered points by combining Partition of Unity (PU) and a Graph-cut approach. PU is a local approximation technique, meaning that the surfaces obtained have high accuracy but are sensitive to noise. Graph-cut, on the other hand, is a global algorithm that is robust to noise but produces low-accuracy results because it is a discrete binary operation. Our algorithm combines these two methods to achieve robust, high accuracy surface reconstruction. First, a PU implicit function is constructed by covering a space containing a point cloud with spherical supports of linear polynomials. Graph-cut is then performed to separate the covered domain into inside and outside areas of the object to be reconstructed. Finally, we extract the zero-level of PU using the marching tetrahedra approach. |
Extraction of Skeletal Meshes from Volumetric Data by Sparse Polynomial Approximation

|
Yukie Nagai, Yutaka Ohtake, Kiwamu Kase and Hiromasa Suzuki The skeletal structures of solid objects play an important role in medical and industrial applications. Given a volumetrically sampled solid object, our method extracts a well-connected and not-fragmented skeletal structure represented as a polygon mesh. The purpose is to achieve a noise-robust extraction of the skeletal mesh from a realworld object obtained using a scanning technology such as the CT scan method. We first approximate the input image intensity through a set of spherically supported polynomials that provide an adaptively smoothed intensity field, and then perform a polygonization process to find the extremal sheet of the field, which is regarded as a skeletal sheet in this research. In our polygonization, a subset of the weighted Delaunay tetrahedrization defined by a set of spherical supports is used as an adaptively sampled grid. The derivatives for detecting extremality are analytically evaluated at the tetrahedron vertices. We also demonstrate the effectiveness of our method by extracting skeletal meshes from noisy CT images. |
[Domestic Conference Proceedings]
| 2011 | 1 domestic publication in a refereed conference proceedings |
| 2009 | 1 domestic publication in a refereed conference proceedings [award-winning] |
Poster
Direct Tetrahedral Mesh Generation from X-ray Projection Images for Finite Element Analysis
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki
The 6th Conference on Industrial Computed Tomography (iCT2016), 9-12 February, Wels, Austria, 2016.
Tomographic Surface Reconstruction from Point Cloud (Reviewed)
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki
Symposium on Solid and Physical Modeling 2014 (SPM 2014), HongKong, China, 2014.
Polygonizing Skeletal Sheets of CT-Scanned Objects by Partitioin of Unity Approximations (Reviewed)

|
Yukie Nagai, Yutaka Ohtake, Kiwamu Kase and Hiromasa Suzuki The skeletal structures of solid objects play an important role in medical and industrial applications. Given a volumetrically sampled solid object, our method extracts a nice-looking skeletal structure represented as a polygon mesh. The purpose is to achieve a noise-robust extraction of the skeletal mesh from a real-world object obtained using a scanning technology such as the CT scan method. We first approximate the input through a set of spherically supported polynomials that provide an adaptively smoothed intensity field, and then perform a polygonization process to find the extremal sheet of the field, which is regarded as a skeletal sheet in this research. In our polygonization, a subset of the weighted Delaunay tetrahedrization defined by a set of spherical supports is used as an adaptively sampled grid. The derivatives for detecting extremality are analytically evaluated at the tetrahedron vertices. We also demonstrate the effectiveness of our method by extracting skeletal meshes from noisy CT images. |
Talks
Surface Mesh Extraction from Sinogram for Multimaterial Object
Yukie Nagai, Yutaka Ohtake, Hiromasa Suzuki
International workshop on smart design and manufacturing (IWSDM'2015), Istanbul, Turkey, July, 2015.
Detection of internal defect of CMC from CT image
Yu Hasegawa, Yukie Nagai, Hiromasa Suzuki, Yutaka Ohtake,
Hiroyuki Hishida, Koichi Inagaki and Takeshi Nakamura
2nd KJ workshop on iCT 2014, Tokyo, Japan, June, 2015.
Robust Surface Reconstruction Based on CT Reconstruction
(Refereed)
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki
Curves and Surfaces 2014, Paris, France, June, 2014.
Toward extraction of yarn direction on low resolution CT volume
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki
1st KJ workshop on iCT 2014, Incheon, Korea, April, 2014.
Surface Reconstruction with Emulating Computed Tomography
(Refereed)
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki
Curves and Surfaces 2012, Oslo, Norway, June, 2012.
Differential Operators on Arbitrary Dimensional PU Spherical Covers
(Refereed)
Yukie Nagai, Yutaka Ohtake and Hiromasa Suzuki
Curves and Surfaces 2010, Avignon, France, June, 2010.
[Domestic Talks]
Please refer the Japanese page.| 2014 | 1 talk in domestic research conference [award-winning] |
| 2012 | 1 talk in domestic research conference |
| 2011 | 1 talk in domestic research conference |
| 2010 | 4 talks in domestic research conferences |
| 2009 | 2 talks in domestic research conferences |
| 2008 | 2 talks in domestic research conferences |
| 2007 | 1 talk in a domestic research conference |
| 2006 | 1 talk in a domestic research conference |
Thesis
[Ph.D thesis] Processing of Scanned Geometry Using Spherically Supported Functions
Supervisor: Professor Hiromasa Suzuki.
[Master thesis]
(written in Japanese)
Information Science and Technology
from Graduate School of Information Science and Technology,
University of Tokyo, March, 2007.
Supervisor: Professor Kokichi Sugihara.
Research Flyer
|
|

|
|

|
|
|
|
|
|